Robots: VEX Push Back
Game Manual Summary
The game manual is 146 pages. That's a lot. I've condensed it down to just the most important rules you need to know. Click the button below and I'll send my reference sheet right to your inbox.
Robot in 3 Days
(it's better then you think)

I was so excited when the game was released that I hosted a 3-day build session with a few of the best teams in the world (including High Stakes world champion team 80001B). Here's one of the robots we made.
Robot in 3 Days (explained)

The first release of the robot in 3 days was more of a reveal. This is an in-depth explanation on how it works, and what I did to make it even better.
Color Sorting
(it's easier than you think)

If you've never done color sorting before, it might sound like a nightmare. If you did color sorting last year, it was probably a nightmare. But I have good news for you: this year it's way easier. Check it out below.
Herobot: Dex
(and how you can make it better!)
VEX usually releases an explanation of potential improvements when they release their herobot each year. This year they didn't. So I made one for you. Check it out below!
Learn to Build an Intake
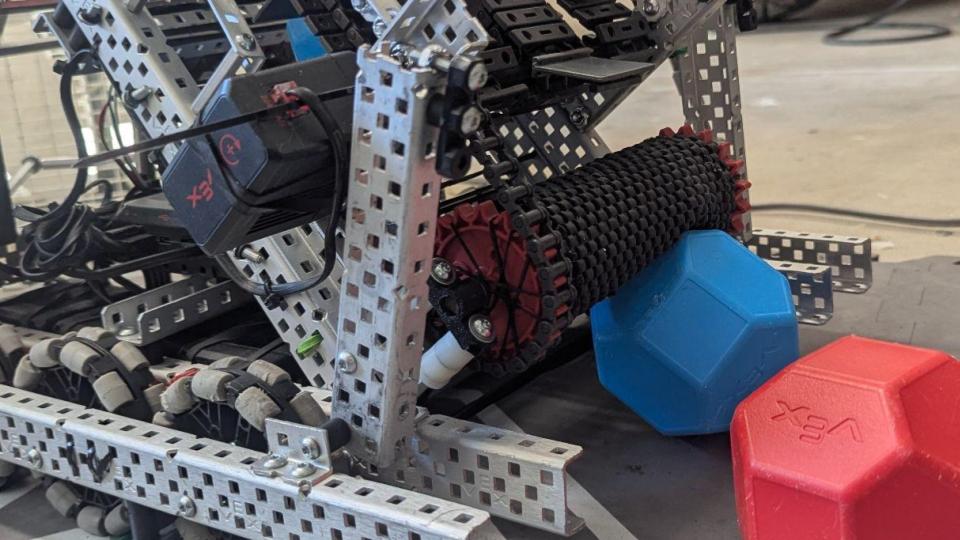
One of the biggest challenges for new VEX teams is figuring out how to build an intake that actually works. If you’ve ever struggled to pick up game objects, you know how frustrating it can be. That’s why I put together a beginner-friendly video walking through simple intake designs for VEX Push Back.
Build a Match Loader
How does a match loader work in VEX Push Back? In this video, I’ll walk you through the design of my match loader so your team can build one that’s consistent and reliable.
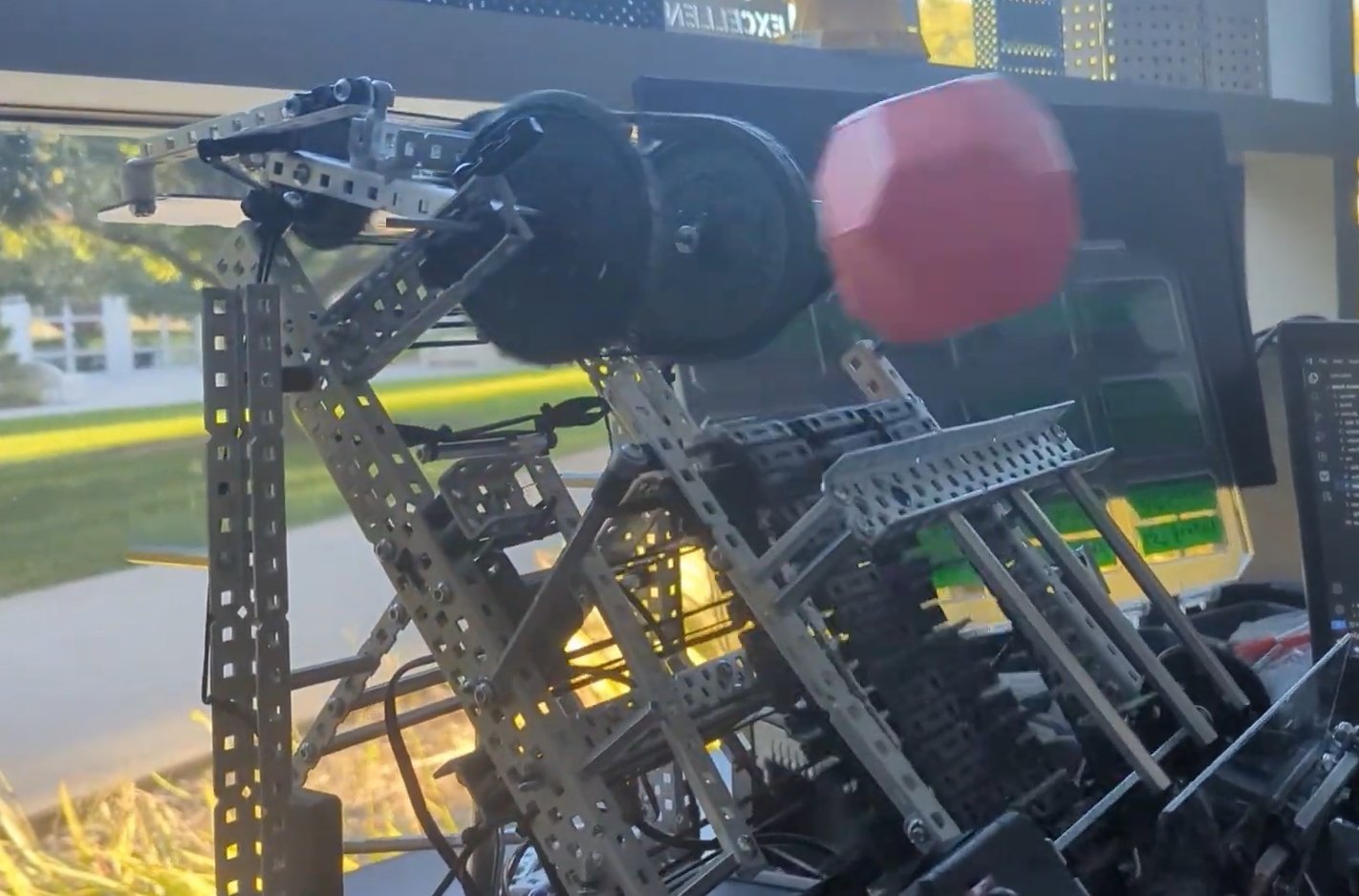
Long Goal Scoring (and Descoring!)
Scoring in the long goal is essential to sinning any match. I'll break down exactly how I do it and some key things to watch out for.
Robot Explanation
(Riguan design)
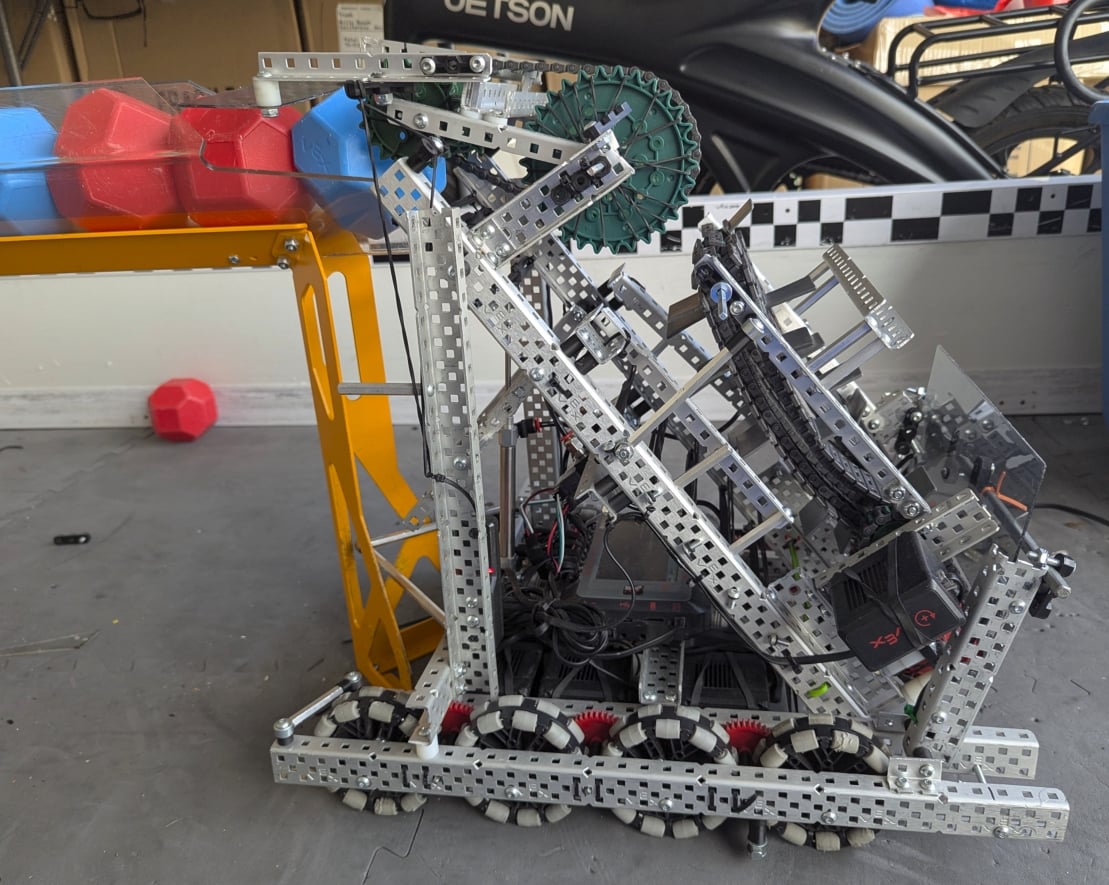
In this video, I’ll walk you through the design of my version of the so-called Riguan design that has been having unprecedented successes this season, so your team can learn how to build one too!
Color Sorting
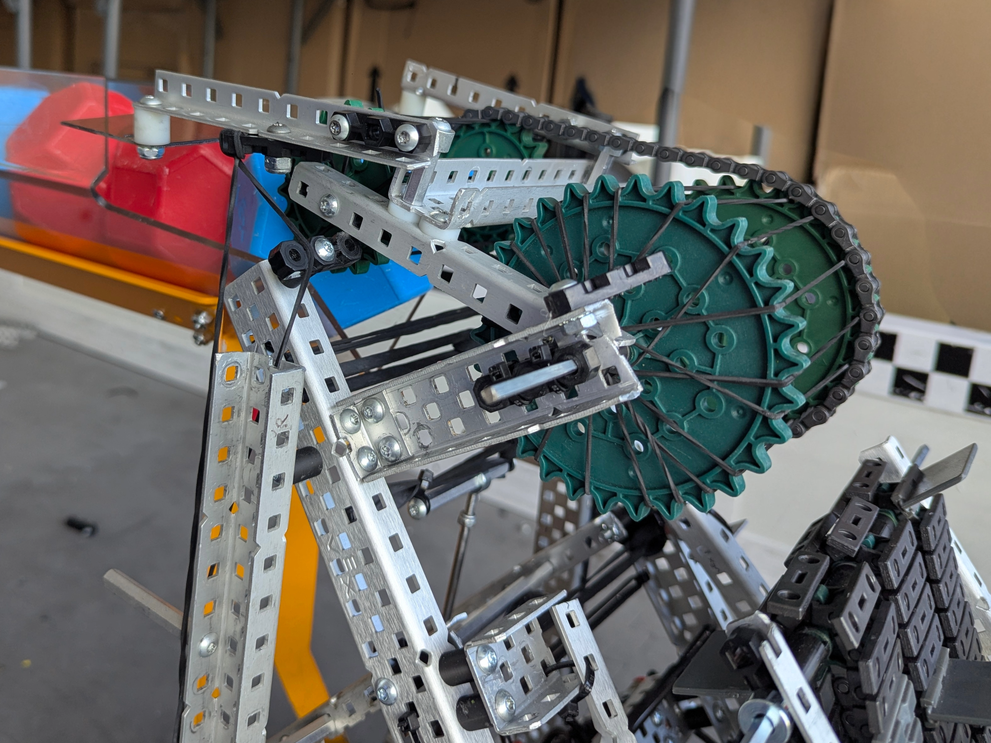
I’ll show you exactly how the color-sorting mechanism works from a mechanical perspective, how it interacts with the intake and scoring system, and what a major flaw with this design is so you know before you build it.
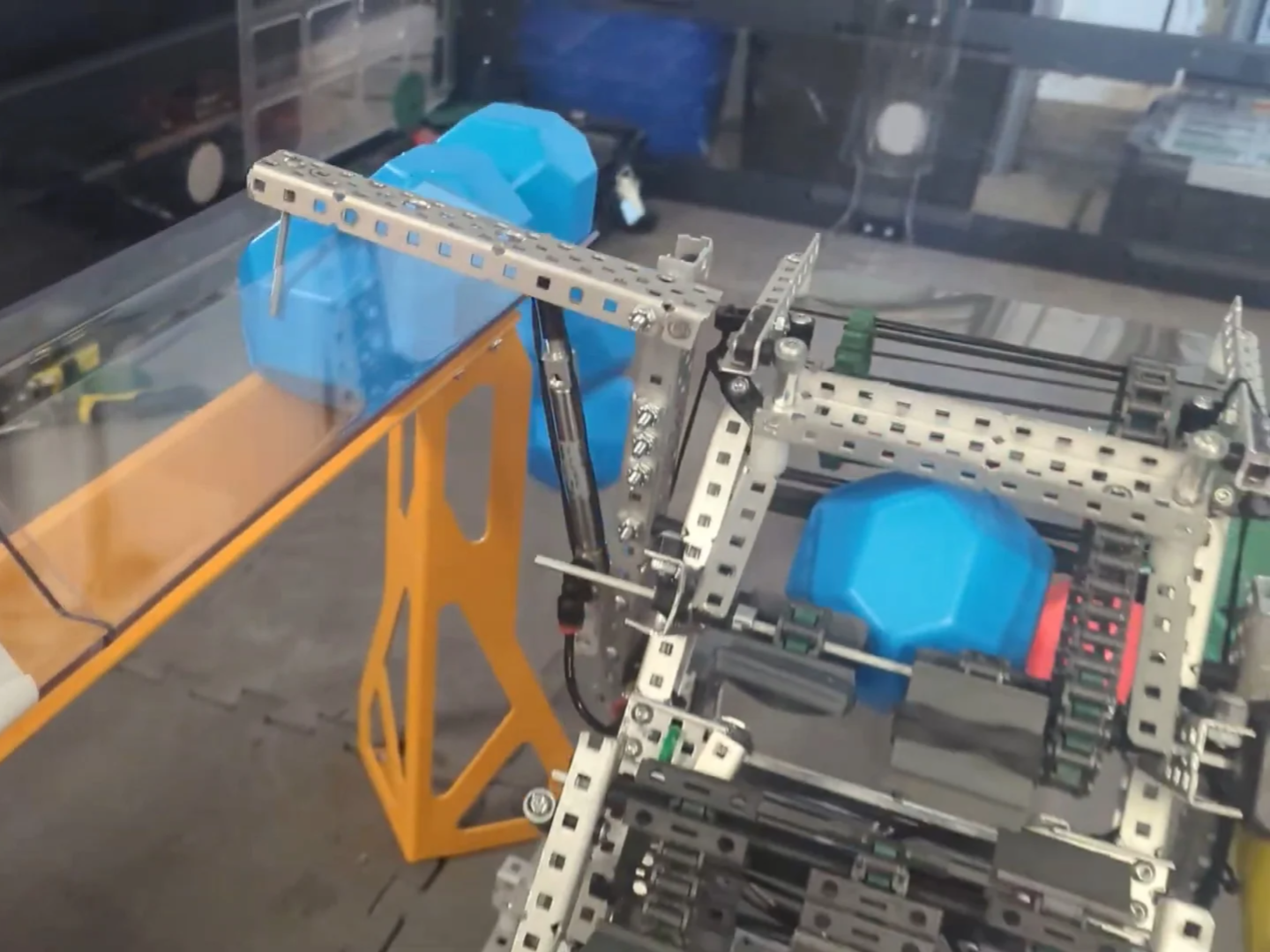
Upper Mid Goal Scoring
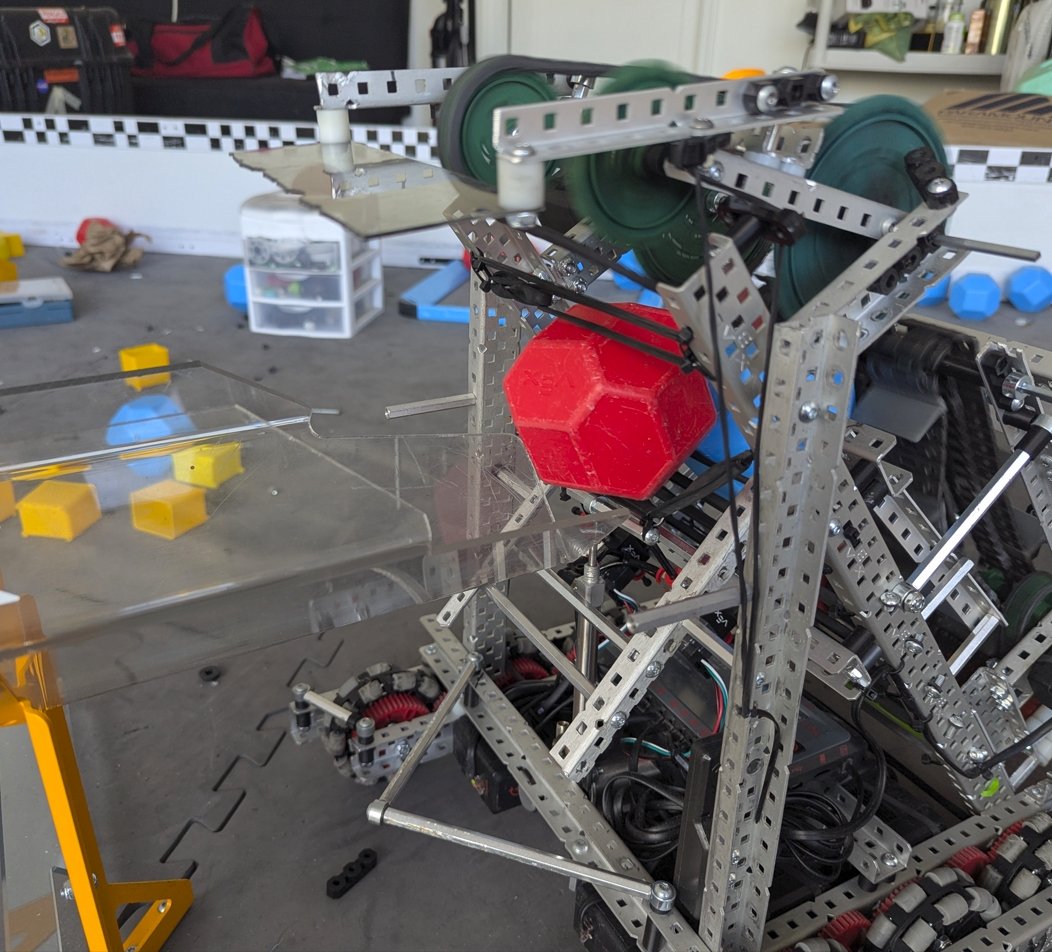
This one’s all about how the pneumatic cylinder pulls the rubber band out of the conveyor floor so the block can drop cleanly into the goal when scoring.
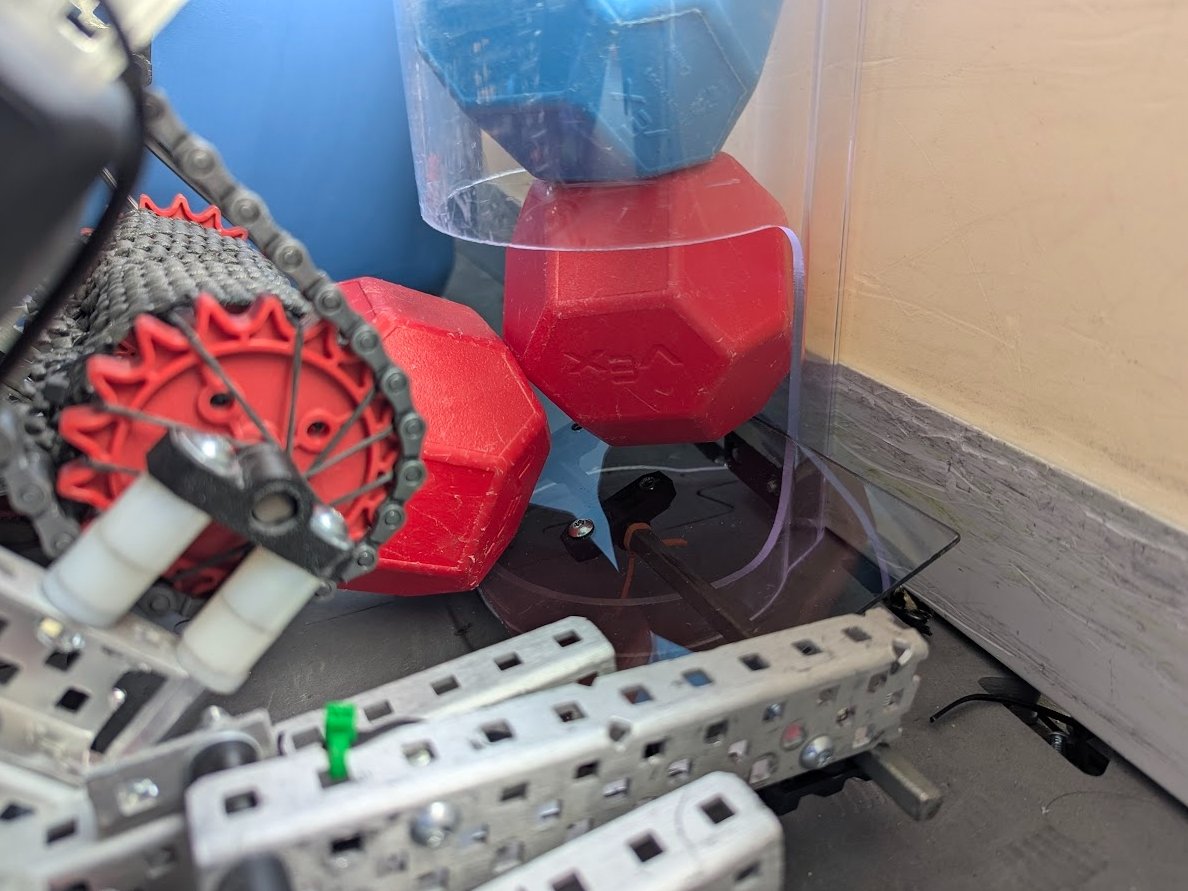
Descore Wing
(You need this mechanism on your robot)
This mechanism IS SUPER IMPORTANT!!
It slides into the long goal and pushes blocks through the tube into the control zone, locking them in place where they’re much harder to remove. In a lot of matches, the team that controls that center zone wins, so having a reliable way to fill and protect it is huge.
Advanced Auton Coding
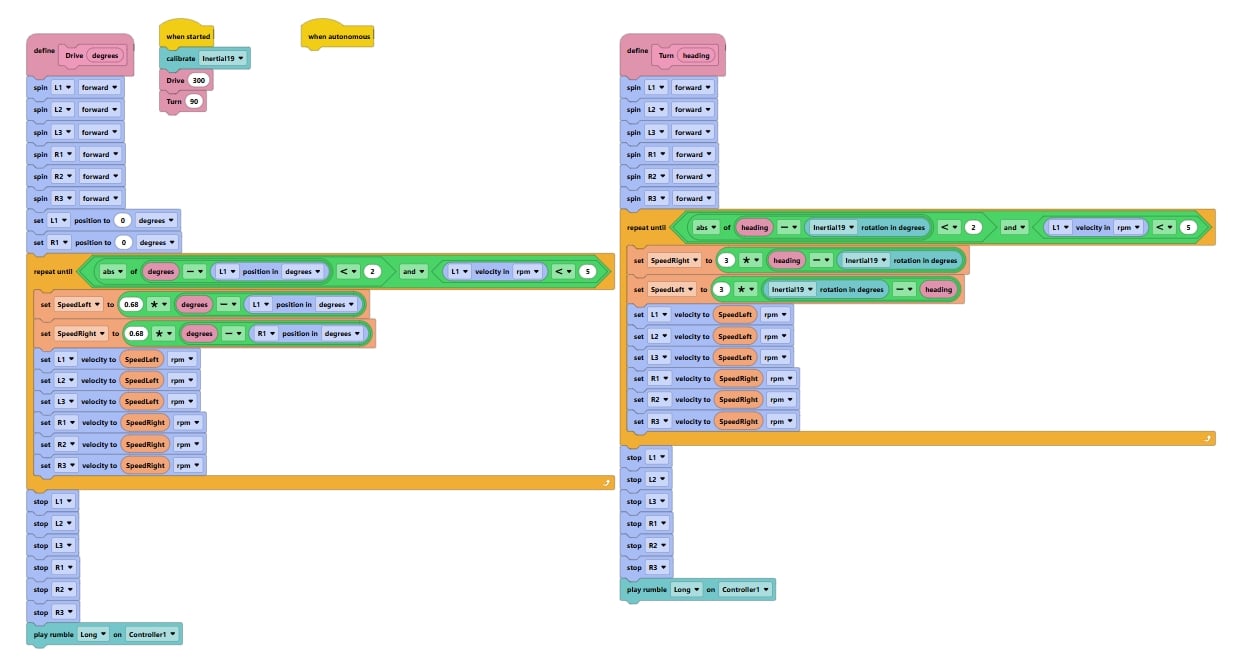
A more advanced way to code a 6-motor drive for autonomous routine.
It is very doable to make a more complex program involving an P-loop or full PID in blocks, that's jut a bit more complex, and this method will work for simple, straightforward autonomous programs.
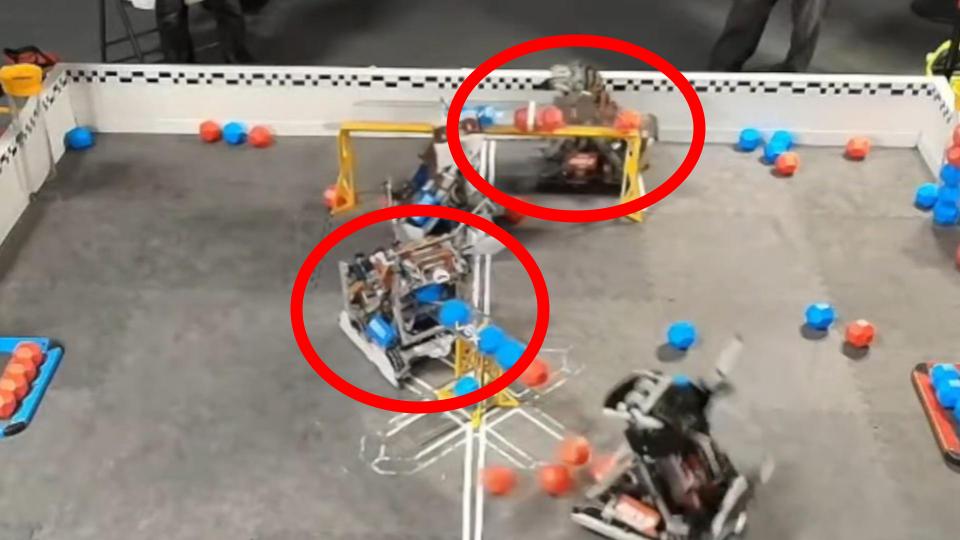
Basic Strategy

If you’re a newer VEX V5 team and feel like there are one or two teams that always dominate your competitions, this is for you.
These are strategies I’ve seen newer and mid-level teams use successfully to play cleaner matches and win more consistently in VEX Push Back.
Advanced Strategy
If you’re an experienced VEX V5 team but feel like there are still a few teams that always dominate your competitions. Or maybe you are that team who steamrolls everyone, but you want to do it in good form. Or maybe you want practice for worlds using good strategy. Either way, you're going to want to check this out.
These are strategies I’ve seen good teams use successfully to win more consistently in VEX Push Back.
Rubber Band Roller vs. Flaps
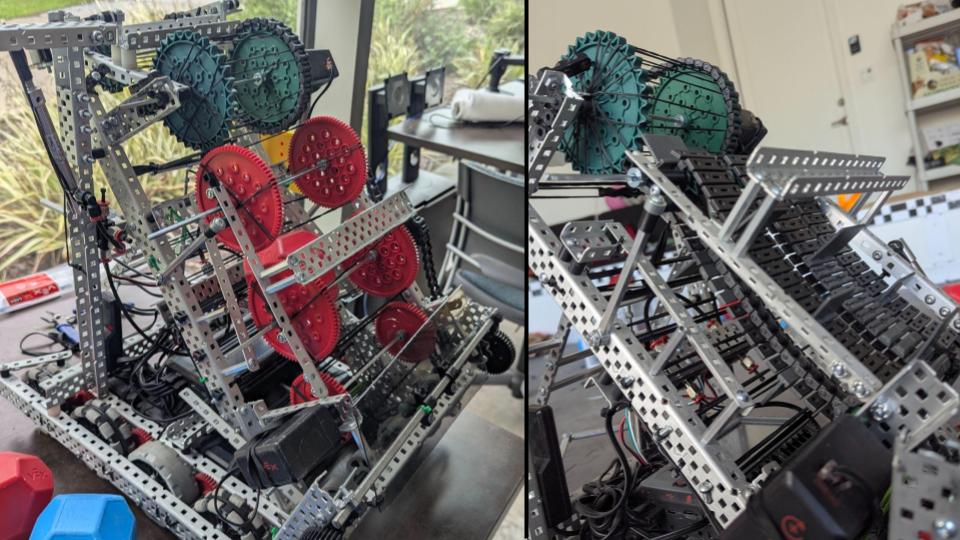
This mechanism slides into the long goal and pushes blocks through the tube into the control zone, locking them in place where they’re much harder to remove. In a lot of matches, the team that controls that center zone wins, so having a reliable way to fill and protect it is huge.